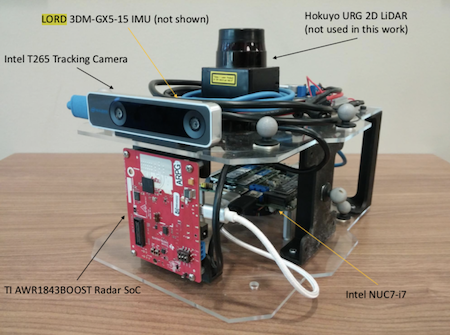





Accurate and reliable estimates of ego-velocity are crucial for closed-loop control of autonomous mobile robots during navigation operations. This is especially true for fast-moving robots like micro aerial vehicles (MAVs). Read more Our method requires only one single-board radar sensor and an IMU, and thus the sensor package we employ is simpler than those used in previous methods.